月面ローバーの固体潤滑軸受の試作品を開発
韓国型月面探査車が月に行く日(仮)
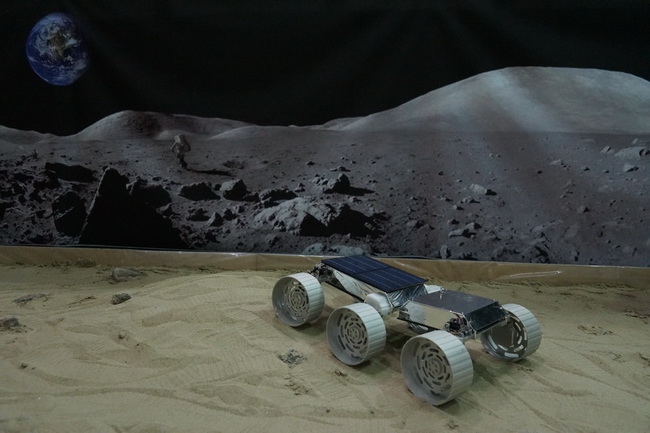
 [宇宙のコスモミーナ]2020年に予定された月探査のためのローバー(rover、車両型ロボット)試験モデルが公開された。 韓国科学技術研究院(KIST)月探査研究事業推進団は月に送る探査ローバーの基本性能を検証するための試験モデル(POC、Proof of Concept)と中核部品の固体潤滑軸受の試作品を開発したと16日明らかにした。
[宇宙のコスモミーナ]2020年に予定された月探査のためのローバー(rover、車両型ロボット)試験モデルが公開された。 韓国科学技術研究院(KIST)月探査研究事業推進団は月に送る探査ローバーの基本性能を検証するための試験モデル(POC、Proof of Concept)と中核部品の固体潤滑軸受の試作品を開発したと16日明らかにした。 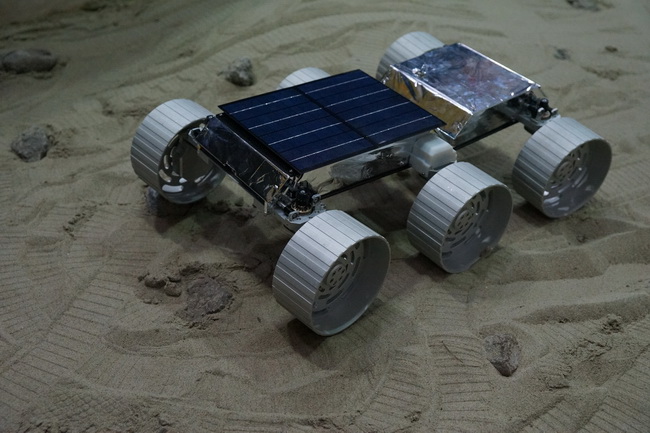
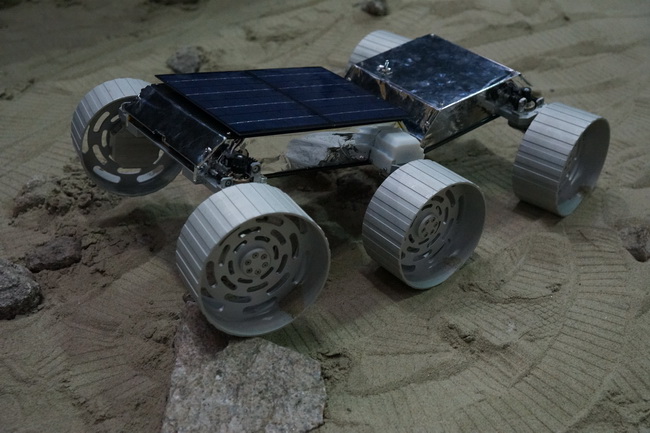
 同日公開されたローバー車は、チェーンの形で連結された二つの胴体に6つの大型タイヤをつけている。 大きさは横50センチx縦70センチx高さ25センチと重さは13キロだ(7キロの装備搭載すれば、計20キロ)。
同日公開されたローバー車は、チェーンの形で連結された二つの胴体に6つの大型タイヤをつけている。 大きさは横50センチx縦70センチx高さ25センチと重さは13キロだ(7キロの装備搭載すれば、計20キロ)。これを1秒当たり4センチの速度で動かし、最大30度の傾斜を登ることができる。 研究責任者であるイ・ウソップ博士は、"地表がでこぼこした月で地面との接触を維持するための設計"と説明した。
これまで米国などが作った無人探査ローバーらは、月に比較的温度差が少なく、(氷点下125度~零上20度)大気がある火星環境に合わせて開発された。
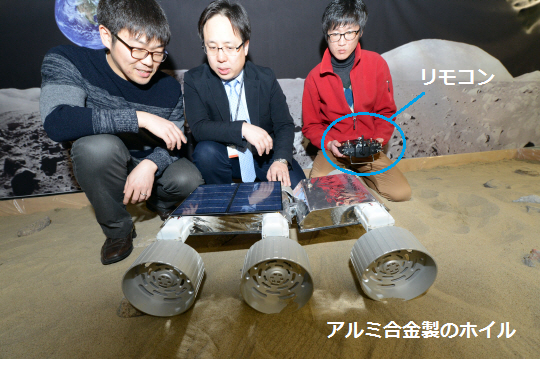
KIST研究チームは月の極低温・極高温・高放射線環境でローバーが故障もなく動くことができるように駆動システム(モーター+コントローラ)を単一の胴体部分を製作ㆍ配置した。 ローバー内部の熱制御システムが最大限簡単で効果的に運用されるようにするためである。 また、液体潤滑油を使用しない固体潤滑軸受を開発した。 月のような高真空環境では油のような液体潤滑剤がその性能を出せないためだ。 イ・ウソップ博士は"今回開発された技術は今後、国防ㆍ災害救助用ロボットに直接活用が可能だ"と明らかにした。
月探査事業は、昨年末、国会で'メッセージ予算'の是非の中で予算が全額削減された。 今回の研究は、未来創造科学部が主管する政府出資研究機関が自主予算で進行する協力融合研究事業の一環として行われた。 KIST以外にも、航空宇宙研究院ㆍ生産技術研究院ㆍ材料研究所ㆍ自動車部品研究院など6機関がこの事業に参加している。
(翻訳:みそっち)
どこかで見たようなホイールですよ
現在鋭意検索中

ランキング")